Le son dans le monde sous-marin ;
l'immersion du plongeur. Concours
général 2026.
En
poursuivant votre navigation sur ce site, vous acceptez l’utilisation
de Cookies vous proposant des publicités adaptées à vos centres
d’intérêts.
.
| .. |
.
.
|
|
.
.
|
..
..
......
...
|
Le son dans le monde
sous marin.
Plusieurs mammifères vivent dans le
milieu aquatique. Parmi eux, les dauphins ont la particularité de
produire
des ondes ultra-sonores appelées clics pour sonder le milieu
environnant.
Ces ondes acoustiques entrent en collision avec les objets environnants
et l'écho reçu par le dauphin lui permet
d'analyser la distance, la texture et la vitesse de l'obstacle.
On considère une onde acoustique émise en un point O. À t=témise,
celui-ci émet un clic qui se propage dans la
direction (Ox).L'onde rencontre un obstacle situé à une distance d
qui va réfléchir une partie de l'onde reçue.
L'émetteur situé en O reçoit l'onde réfléchie à un instant t = treçu.
Q1. Exprimer la
distance d de l'obstacle en fonction de la célérité du
son dans l'eau cmer, et de la durée entre
l'émission et la réception du clic
d = 0,5 cmer(treçu-témis)= 0,5 cmer Dt.
.
On suppose que I'obstacle est situé en un point M à une distance r de O
dans un milieu où I'atténualion est
faible. L'iintensité I(r) de l'onde acoustique satisfait alors
l'équation différentielle d'ordre 1 suivante :
dI/
dr = -al(r)
avec a le
coefficient d'atténuation de l'onde dans le milieu étudié. En
notant I(r = 0) = I0 l'intensité de l'onde
émise en O, on a dans l'eau de mer:
 Q2.
Q2. Résoudre
l'équation différentielle vérifiée par I(r) en utilisant I 0
l'intensité acoustique émise au point O.
I(r) = A exp(- ar)
avec A une constante.
I(0) = A = I 0 ; I(r)
= I0 exp(-ar).
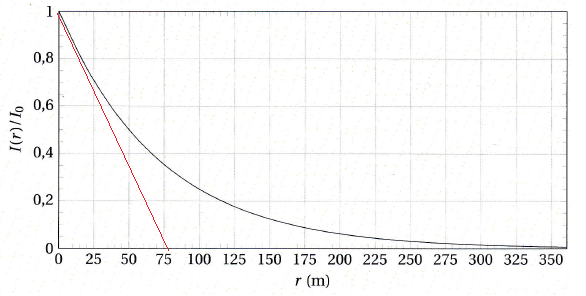
Q3. Déterminer
graphiquement la valeur de a,
le coefficient d'atténuation dans l'eau de mer.
dI(r) /dr = - a I 0exp(-ar).
Equation de la tangente à la courbe à t = 0 : I = -a I0 r+1
Coefficient directeur de la tangente à
l'origine : I = -a I0 ; a=1 /
75 m -1.
Q4. Exprimer
I'intensité acoustique réceptionée par l'émetteur I recep en
fonction de R= I ref / I in, I 0, a et d puis en fonction
de R, c mer, l 0, a et Dt= t reçu-t émis.
I(r) = I0 exp(-ar).
Irecep =R I(r)=R I0 exp(-2ad)=R I0 exp(-2a cmerDt).
On définit l'impédance acoustique d'un milieu Z m comme:
Z m= rmc m.
ou Z m est l'impédance du milieu de masse volumique rm et où
la célérité du son dans le milieu est c m.
À l'interface entre deux milieux, une parüe de l'onde incidente qui
arrive du milieu I est réfléchie. On appelle I in,
I'intensité acoustique de l'onde incidente au niveau de l'interface, I réf
I'intensité acoustique de I'onde réfléchie au niveau de l'interface, on
déflnit alors R le coefficient de réflexion entre les deux milieux :
R =I réf / I in.
oùr R dépend des impédances acoustiques des deux milieux :
R=(Z 1- Z 2) 2 / (Z+ Z2)2
.
avec Z 1 et Z 2 les impédances des milieux 1 et 2.
On considère toujours un émetteur en O. À t=t émis, celui-ci
émet un clic d'intensité I 0 dans la direction (Ox).
L'onde rencontre un obstacle situé à une distance d qu'on modélise par
un second milieu d'impédance Z obs
tandis que le milieu marin possède une impédance Z mer.
L'émetteur situé en O reçoit l'onde réfléchie d'intensité
I récep à un instant t = t reçu.
Q5. Calculer la
valeur de l'impédance acoustique de la mer Z mer.
Zmer=
rmercmer=
1,03 10 3x1,5 10 3 =1,545 10 6kg m -2
s -1.
Q6. On donne Z roche=10
x 10 6kg m -2 .s -1 et Z poisson
= 1,5 x 106kg m-2
.s-1. Sachant que l'émetteur reçoit un
signal l récep = I 0 x 10 -4 au bout
d'un durée Dt =
67 ms, en déduire la nature de l'obstacle.
Irecep =R I0
exp(-2a cmerDt).
R = Irecep /( I0 exp(-2a cmerDt))=10-4
/exp(-2 x0,067 x1500 / 75) =0,0015.
Dans l'hypothèse du poisson : R = (1,5- 1,545)2 /(1,5+ 1,545)2 =0,032.
Dans l'hypothèse de la roche
: R = (1,5- 10)2 /(1,5+ 10)2 =0,546.
Les poissons constituent l'obstacle.
On considère que l'obstacle qui est
initialement à une distance d s'éloigne du dauphin à une vitesse v 0
par rapport au dauphin. Le dauphin et l'obstacle sont considérés comme
appartenant à un axe (Ox) fixe.
Q7. Montrer que si
le dauphin émet un signal périodique de période T, le signal reçu après
réflexion sur un poisson P de vitesse v 0 par rapport
au dauphin est périodique de période T ' qui s'exprime selon :
T '=T (1+2v 0 / c mer).
A
l'instant t=0, S émet un signal qui voyage vers P à la vitesse cmer.
Instant t1 auquel P
reçoit le signal : cmer t1 = d+v0t1
;
t1 = d / ( cmer -v0).
Instant de retour vers l'émetteur-récepteur : 2t1.
Instant T, émission du second signal.
Instant t2 : durée du parcours
émetteur poisson : cmer t2 = d+v0(T+t2
) ;
t2 = (d+v0T) / ( cmer -v0).
Instant de retour vers l'émetteur-récepteur : T+2t2.
T ' =T+2 t2-2t1 =T+2(d+v0T-d) / ( cmer -v0)=T+2v0T / ( cmer -v0)= T(1+2v0 / ( cmer -v0)).
|
...
= =
|
....
|
L'immersion
du plongeur.
L'immersion
est le moment où le plongeur débute sa descente. On considèrera dans la
suite un plongeur muni de son matériel standard:
- une combinaison de plongée;
- un bouteille d'air comprimé reliée à un détendeur qui permet de
fournir I'air nécessaire pour la respiration et le gilet à la pression
extérieure;
- un gilet stabilisateur relié au détendeur;
- un masque;
- une, paire de palmes;
- une ceinture de plomb;
- un ordinateur muni d'un profondimètre électronique.
Pour compenser la flottaison de la combinaison, le plongeur se munit
d'une ceinture à laquelle il ajoute des plombs de 1kg. On considère
qu'un plongeur possède un lestage approprié si en surface, sans fournir
d'effort, Ie gilet vide, et les poumons en respiration normale, le
niveal+d'eau atrive au niveau des yeux.
Pour amorcer l'immersion le plongeur n'a alors qu'à vider ses poumons
pour descendre. Lors de la descente le plongeur surveille sa profondeur
à l'aide de son profondimètre. Arrivé à la profondeur voulue, celui-ci
gonfle son gilet en y injectant un peu d'air de sa bouteille à l'aide
du détendeur. Lorsque le plongeur se maintient à la même profondeur, il
est dit équilibré.
Stabilisation du plongeur.
On s'intéresse aux aspects mécaniques de l'immersion. On modélise le
système {plongeur + équipement + plomb + air ) comme ceci:
- une masse rn =m0+ mplomb avec m0 =
75 kg la masse du plongeur muni de son équipement avec la bouteille
remplie d'air comprimé et mplomb la masse de plomb qu'il
ajoute à sa ceinture.
- un volume immergé Vim = V0 + Vair
avec V0 = 75L le volume incompressible du plongeur (lorsque
ses poumons et son gilet sont totalement vides) et Vair, le volume qu'occupe I'air
présent dans ses poumons et dans le gilet.
Lorsque le gilet est vide, Vair peut varier entre 0 L et 5 L
lors de I'inspiration et I'expiration.
Q8. En se plaçant à
une pression maximale de 3 bar et une température T0 = 293K,
justifier que la masse d'air expirée sera négligeable devant rn0
la masse du plongeur et de son équipement.
P Vair = n RT0 ; n = 3 105 x 5 10-3
/(8,3 x293) =0,62 mol ;
masse d'air expirée : n M(air)= 0,62 x 29 ~ 18 g.
On négligera dans la suite la variation de masse lors de l'expiration.
On donne l'expression de la norme de la poussée d'Archimède qui
s'exerce sur un objet de volume immergé Vim
dans la mer de masse volumique rmer
:
F= rmer
Vim g.
Q9. Le système
{plongeur + équipement + plomb + air } souhaite démarrer son immersion,
pour cela il vide l'air de son gilet et on prendra Vair = 2
L qui correspond au volume moyen des poumons lors de la respiration. En
négligeant le volume de la ceinture de plomb, exprimer, en fonction de rmer, V0,
Vair, et m0, la masse de plomb mplomb
dont le plongeur pour que le lestage soit approprié. Calculer à 1 kg
près.
Poids = P = rn =(m0+ mplomb) g.
Poussée : F = rmer
(V0 + Vair) g.
Poussée < poids : rmer (V0
+ Vair) g < (m0+ mplomb) g.
rmer (V0
+ Vair) <m0+ mplomb.
mplomb >rmer (V0
+ Vair) -m0.
mplomb > 1,03 103(75+2)10-3-75 ; mplomb
>4,31 kg ; mplomb >5 kg ;
Le plongeur est ensuite immergé et à une profondeur z :
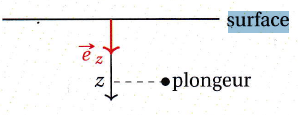
On suppose que l'eau de mer est un liquide incompressible dont la
pression P(z) respecte l'équation locale de la statique des fluides
P(z)=Patm+ rmer
g z.
On considère toujours le système {plongeur + équipement + plomb + air
}. On suppose que la quantité d'air nair contenu dans les
poumons et dans le gilet reste à la température T0 = 293K,
occupe un volume Vair(z) et se comporte cornme un parfait à
la même pression que la pression de I'eau à l'extérieur. On considère nair
comme constant en négligeant la respiration du plongeur.
Q10. En utilisant
l'équation locale de la statique des fluides, montrer que la poussée
d'Archimède qui s'exerce sur le système s'exprime comme :

La poussée est verticale vers le haut et sa valeur est égale à :
rmer
g(V0 +Vair) avec Vair = nair
RT / P(z) = nair RT / (Patm+ rmer g z)
Q11. En appliquant
le principe fondamental de la dynamique, établir I'expression de
l'accélér ation a du plongeur en fonction de g, rmer, rn0
, mplomb, V0, nair, R, T0, Patm
et z.
m a = m g - Poussée ; a = g- rmer
(V0 + Vair) g / m= g [1-rmer (V0
+ Vair) / (m0+ mplomb)].
Vair = nair RT / (Patm+ rmer g z)
Q12. Exprimer, en
fonction de z0, g, rmer,,
rn0 , mplomb, V0, nair, R, T0,
Patm et z. ,la quantité d'air nair, nécessaire
pour que le plongeur soit stabilisé à une profondeur z0.
Calculer la quantité d'air nair, et le volume Vair(z0)
nécessaire pour être stabilisé à z0=20 m.
L'accélération foit être nulle : poids = poussée.
rmer
(V0 + nair
RT0 / (Patm+ rmer g z0))= m0+ mplomb.
V0 + nair RT0 / (Patm+
rmer
g z0)=( m0+
mplomb) / rmer.
nair RT0 / (Patm+ rmer g z0)=( m0+ mplomb)
/ rmer-
V0.
nair =((
m0+ mplomb) / rmer- V0)(Patm+ rmer g z0)
/ (RT0).
nair =(( 75+ 5)/(1,03
103)- 75 10-3)(1,03 105+
1,03 103*9,8*20) ) / (8,3 x293).
nair =2,67 10-3 *3,05 105 /(2,4 103)
=0,34 mol.
Vair = nair R T / P =0,34 *8,3 *293 / (3,05 105)
=2,7 10-3 m3 = 2,7 L.
On souhaite à présent étudier la stabilité du plongeur lorsque celui-ci
n'est pas exactement à sa profondeur
d'équilibre z0 mais à une profondeur z = z0 + d z auec d z qui peut être positif ou
négatif.
Q13. Déterminer
qualitativement, en justiflant Ie raisonnement, si les forces exercées
sur le plongeur ont tendance à le ramener vers z0 (équilibre
stable) ou à l'en éloigner (équilibre instable) si dz diffère de 0.
Si dz < 0 : z
< z0 ; la poussée augmente : le plongeur remonte et
s'éloigne de z0.
Si dz > 0 : z
> z0 ; la poussée diminue : le plongeur descend et
s'éloigne de z0.
Le plongeur à la profondeur z0 = 20 m injecte une quantité n0
d'air sufflsante dans son gilet pour entrainer un mouvement de
remontée. Pour une question de sécurité la vitesse ascendante de
remontée ne doit pas dépasser la valeur 10 m.min-1
Q14 . Expliquer
qualitativement pourquoi le plongeur devra forcément vider l'air de son
gilet pour rester en dessous de cette vitesse de sécurité. On pourra
s'appuyer sur le résultat de la question précédente.
z diminue au cours de la remontée : Patm+ rmer g z diminue.
nair RT / (Patm+ rmer g z) augmente.
La poussée d'Archimède croît alors que le poids reste constant.
L'accélération augmente ; la vitesse augmente et peu dépasser 10 m /min..
Le plongeur devra vider une partie de l'aair de son gilet.
Afln d'éviter un accident de décompression, il est recommandé
d'effectuer un palier de sécurité de plus de 3 minutes à une profondeur
de 3 à 6 m. Un plongeur possédant une bouteille de 12 L contenant
initialement de l'air comprimé à une pression de 200 bar peut terminer
sa plongée au niveau de la réserve de sa bouteille lorsque celle-ci
contient alors de l'air à une pression de 50 bar.
Q15. Calculer la
masse d'air vidée de la bouteille au cours de la plongée.
Quantité de matière initiale d'air : PV / (RT) = 200 x 105 x0,012 / (8,3 x293)=98,7 mol.
Quantité de matière finale d'air : PV / (RT) = 50 x 105 x0,012 / (8,3 x293)=24,7 mol.
98,7-24,7 =74 mol.
Masse d'air : 74 x Mair = 74 x 29=2 146 g ~2,1 kg.
Q16. Montrer qu'en
fin de plongée le plongeur sera forcément entrainé vers la surface.
Proposer une solution au plongeur.
La poussée d'Archimède augmente alors que le poids reste constant.
Le plongeur se lestera avec un peu plus de plomb.
Mesure de la
profondeur
Pour connaître sa profondeur, un plongeur utilise un profondimètre
électronique. On étudie son principe de fonctionnement, basé sur la
mesure de la pression P(z) qui dépend de la profondeur z du plongeur.
On présente le fonctionnement d'un transducteur de pression qui
utilise une piézorésistance dans un pont de wheatstone :
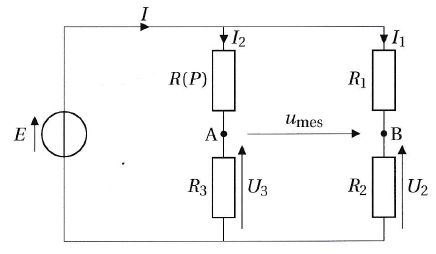
où R1, R2 et,R3 sont des résistances
et R repréçente la piézorésistance dont le comportement peut être
modélisé par une résistance R(P) qui dépend de la pression extérieure P
:
.R (P)= R0 [1 + k(P - P0)]
où R0 est la valeur de la piézorésistance lorsque la pression vaut P=P0 et k = 2,5 x 10-7Pa-1 le coefflcient de piézorésistiüté.
Q17. Exprirnet U2 en foncdon R2 et I1 puis en fonction de E, R1 et .R2.
U2 = R2I1 ; E = (R1+R2) I1 ; I1 = E / (R1+R2) ; U2 = R2 E / (R1+R2).
Q18. Exprimer par un raisonnement similaire U3 en fonction de E, ,R3 et R(P).
U3 = R3I2 ; E = (R(P)+R3) I2 ; I2 = E / (R(P)+R3) ; U3 = R3 E / (R(P)+R3).
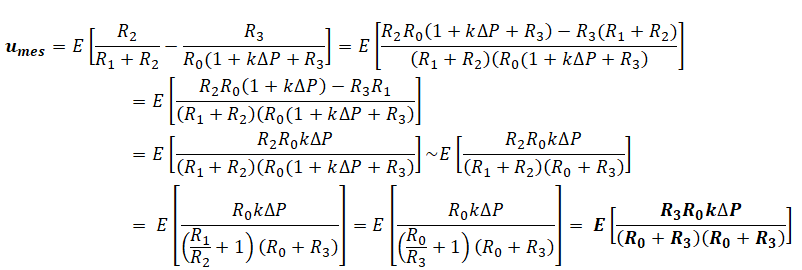
Q19. À partir des deux expressions précédentes, exprimer umes. :
umes=U2 -U3 =R2 E / (R1+R2).-R3 E / (R(P)+R3).= E [R2 / (R1+R2)-R3 / (R(P)+R3).]
On souhalte que umes = 0 lorsque le plongeur est à la surface où P = P0 = 1 bar.
Q20. Donner une relation entre R0, R1, R2 et R3.
R2 / (R1+R2)-R3 / (R(P)+R3)=0 ; R2 / (R1+R2)=R3 / (R(P)+R3).
R2(R(P)+R3) =R3 (R1+R2).
R2 R(P)=R3 R1 ; R2 R0=R3 R1 ;
Q21 . On considère que la relation précédente est vérifiée et que P = P0 + DP. En supposant que kDP << 1, exprimer umes.
umes = E [R2 / (R1+R2)-R3 / (R(P)+R3).].
Q22. On déflnit la sensibilité du transducteur S = umes / DP. Déterminer la relation entre R3 et .R0 pour que la
sensibilité soit maximale.
S = kE R3R0 / (R3+R0)2.
y = R3R0 / (R3+R0)2 doit être maximum.
Dériver par rapport à R0 en posant u =R3R0 et v =(R3+R0)2.
u'=R0 ; v' =2(R3+R0).
(u'v-v'u) /v2 =(R0 (R3+R0)2-2(R3+R0)R0R3) /(R3+R0)4=(R3+R0)[R0 (R3+R0)-2R0R3) / (R3+R0)4=[R0 (R3+R0)-2R0R3] / (R3+R0)3.
R0 (R3+R0)-2R0R3+0.
(R3+R0)-2R3= 0 ; R3=R0.
Q23. Dans ces conditions, pour pouvoir mesurer une variation de pression DPmin,
= 0,1bar, calculer la valeur de E nécessaire pour lire la variation de
tension avec un voltmètre qui affiche les variations de tension avec
une incertitude-type de 10 mV.
umes = E k DP / 4 ; E = 4 umes / (k DP)=4 x0,010 / (2,5 x 10-7*0,1 105)=16 V.
|
|
|
|